Connected and automated vehicles (CAVs) are equipped with detection and communication sensors that enhance real-time perception and decision-making. However, imperfections such as sensor errors, communication delay, and packet loss remain critical challenges that compromise performance and reliability. These imperfections reduce the timeliness of hazard detection and response, increasing crash risk and undermining the accuracy of surrogate safety measures (SSMs). This study introduces a two-dimensional SSM that incorporates communication delay, packet loss, and detection error for a more realistic risk evaluation. The model was validated in SUMO simulation of an urban network near the University of Wisconsin–Milwaukee with 800 vehicles. By accounting for detection and communication imperfections, the proposed method enables more robust safety evaluation of connected and automated systems.
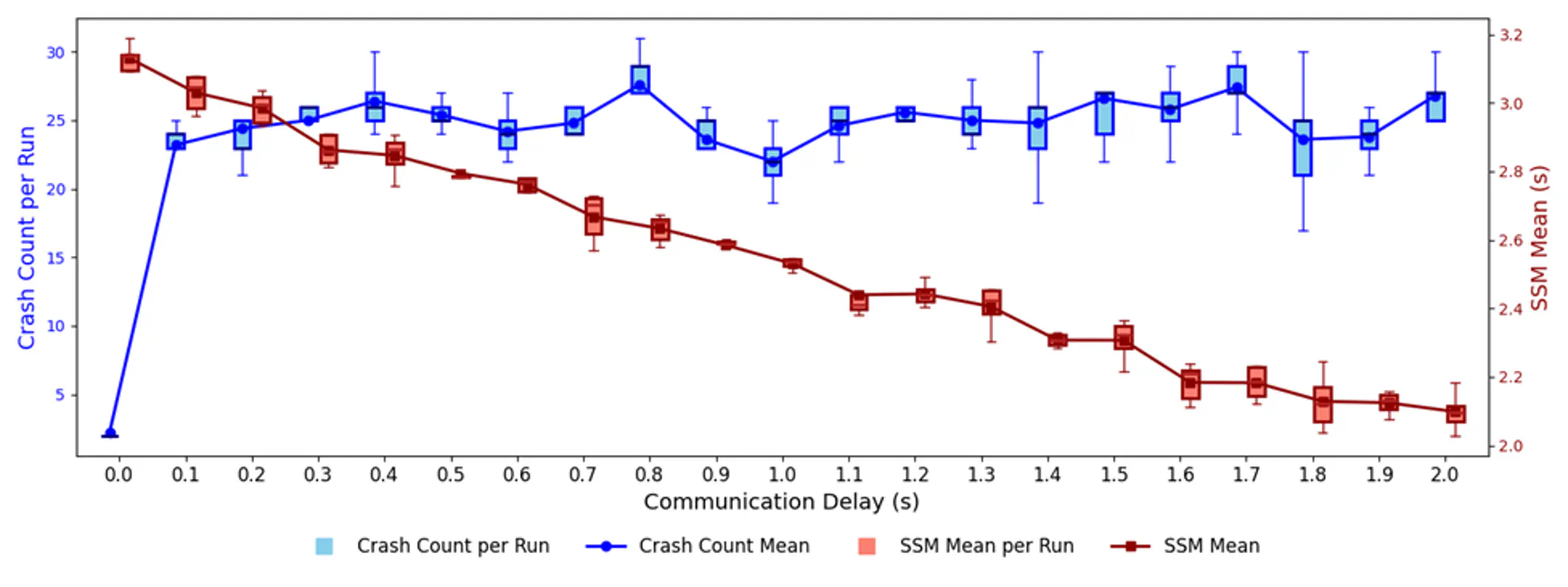
Communication delay
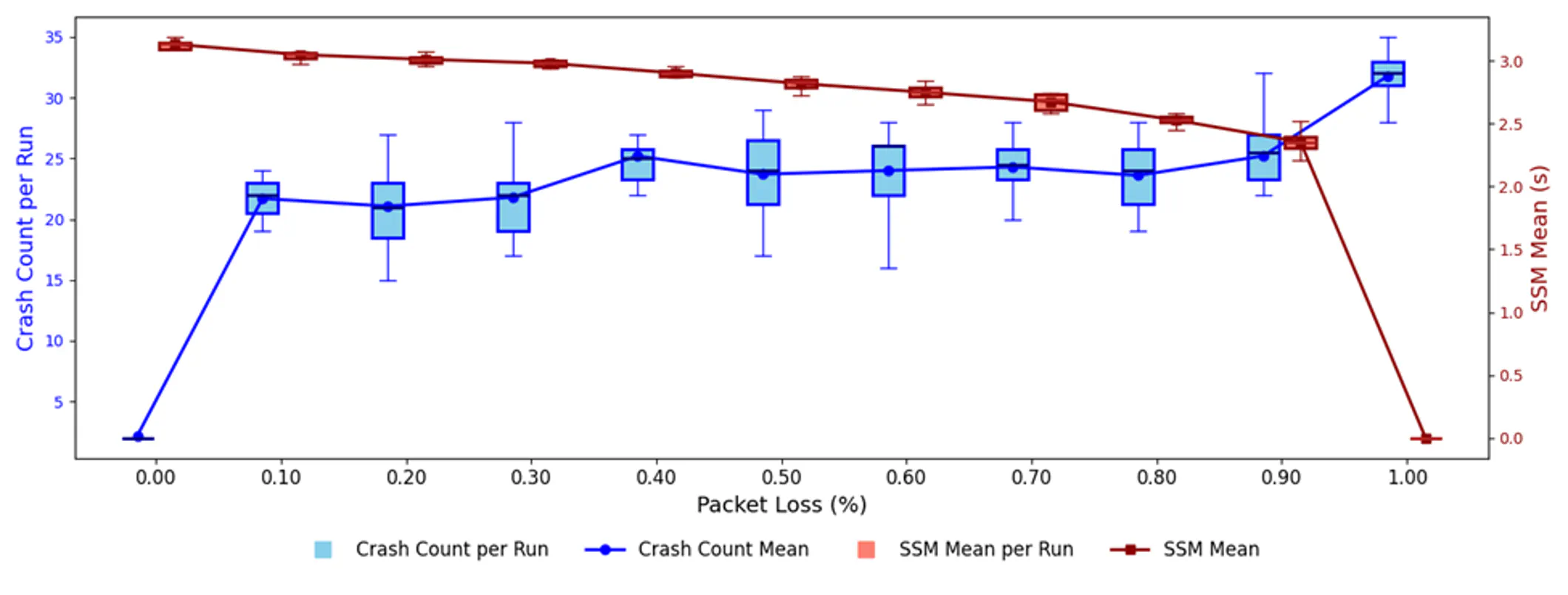
Packet loss
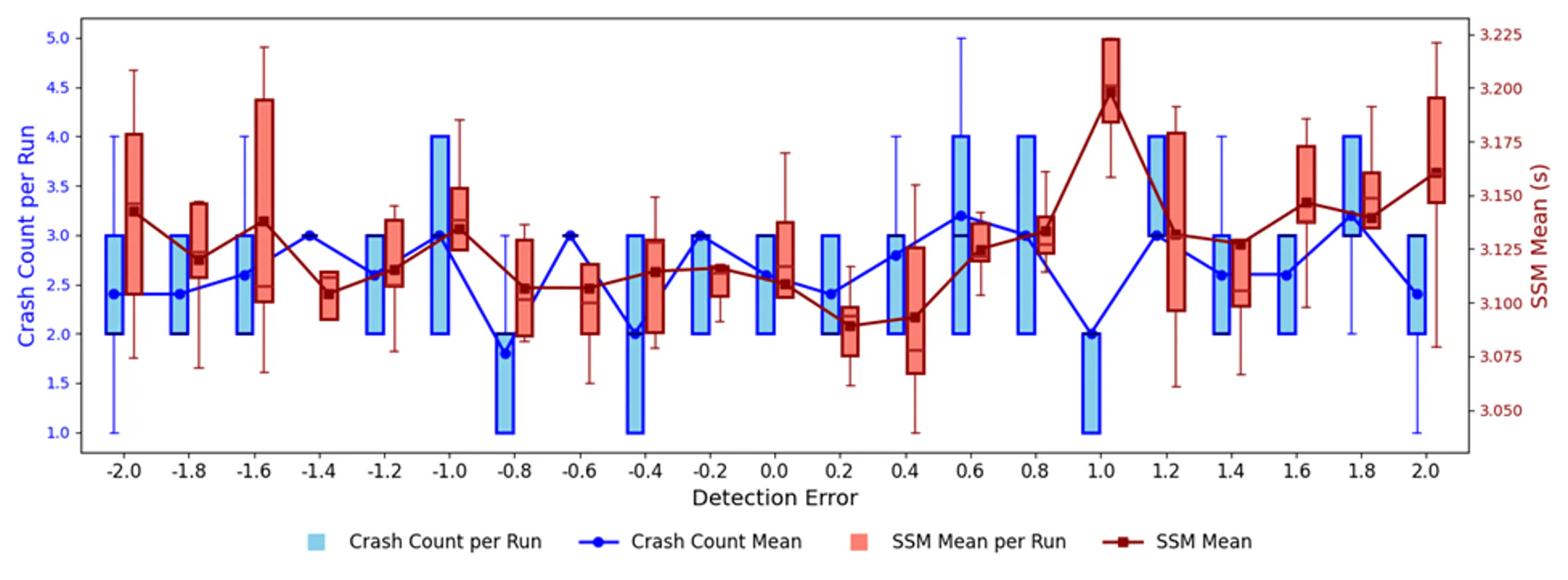
Detection error