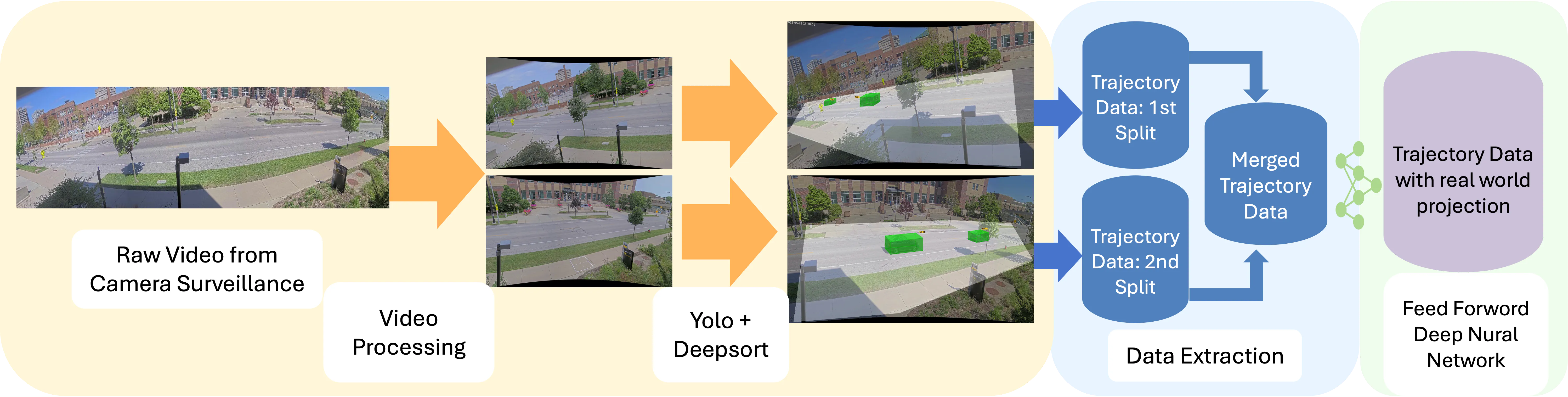
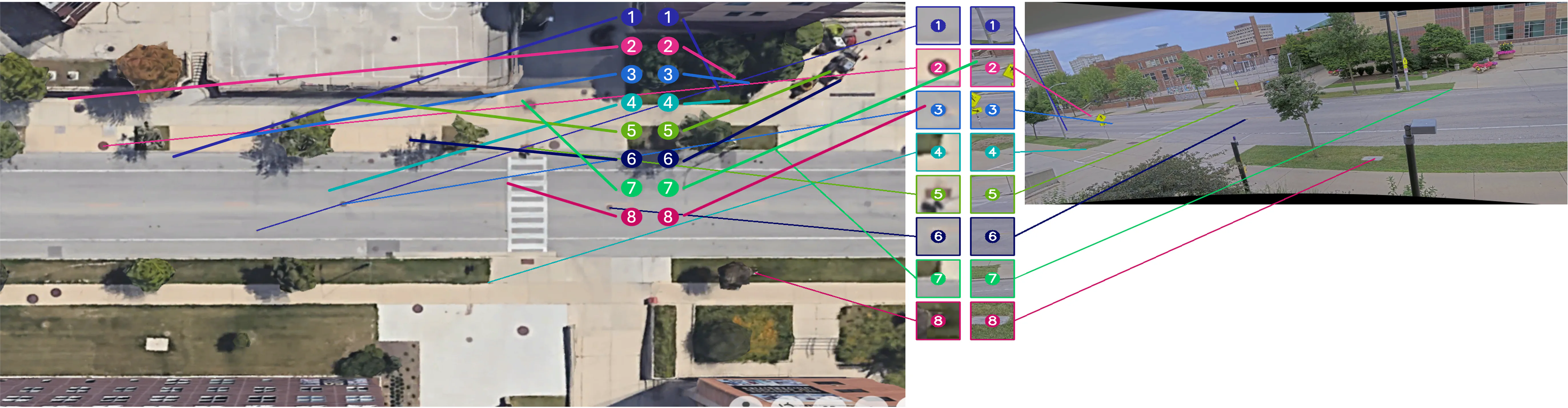
Roadside perception systems are becoming essential to intelligent transportation, supporting traffic monitoring, safety, and CAV integration. Yet, no standardized evaluation framework exists, and generic metrics like precision, recall, and MOTA fail to capture real-world challenges such as wide-angle distortion, occlusion, and object interactions. This paper introduces a structured evaluation methodology emphasizing accuracy, robustness, and real-time performance. We tested a panoramic camera system at an urban crosswalk, benchmarking its outputs against centimeter-level RTK GNSS trajectories. Results reveal key reliability factors, including perspective distortion, synchronization errors, and trajectory inconsistencies, along with recurring failures such as offset, delayed updates, and misalignment. These findings highlight the need for holistic evaluation protocols to ensure scalable and dependable deployment of roadside perception.